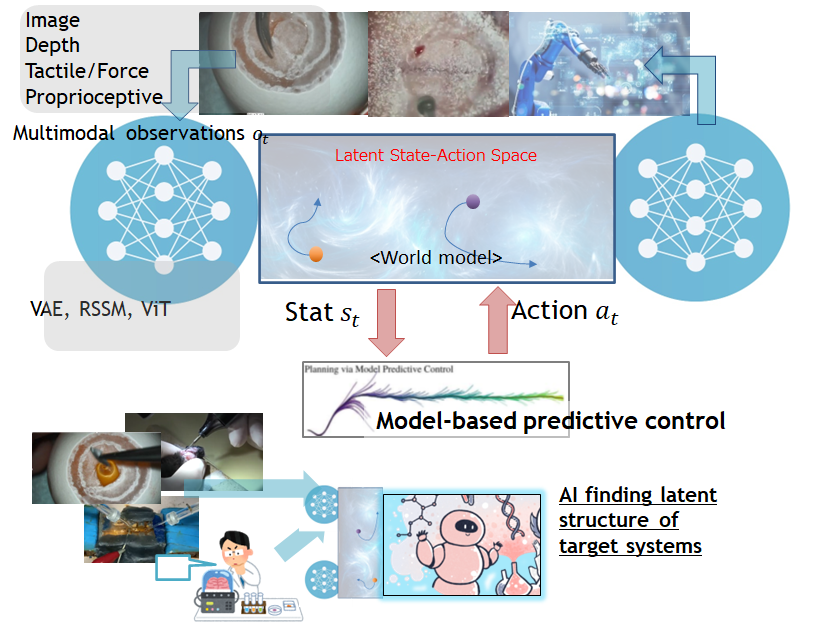
1. 実世界情報に基づく知覚と制御のための世界モデルアプローチ
認知・発達ロボティクスは、人間の子どものように、環境との相互作用を通じて発達するロボットを作ることを目指す研究分野だ。これは、ロボット工学の夢の一つだ。自律的な認知システムは、相互作用を通して学習し、環境に適応することができるはずである。特に、適応や学習の基礎となるロボットの経験は、ロボットの感覚運動系から得られるものであるべきだ。ロボットの行動や知覚サイクルに基づき、ロボットの発達や学習を可能にする認知ダイナミクスを作り出すことは、認知・発達ロボティクスにおける重要な課題である。発達過程で起こる自律的な学習過程は生涯学習とも呼ばれ、適応型協調ロボットに必要な社会的能力の発達の基礎となると考えられている。
2010年代の深層学習や確率的生成モデルにおける優れた成果を踏まえ、人工知能の分野でも世界モデルが注目されている。自分自身を含めた世界モデルを学習する認知システム(エージェントなど)は、将来の感覚的な観測結果を予測し、それに基づいてコントローラ(制御器)を最適化することができるようになる。この考え方は、ロボットが適応的な行動や社会的知覚を獲得するためのニューロダイナミカルシステムを開発するために、ニューロロボティクスで研究されてきた予測符号化と密接に関連している。予測符号化と世界モデルは、近年神経科学で有力な理論となっている自由エネルギー原理と基本的な考え方が共通している。
世界モデル(world model)ベースのアプローチは有望である。しかし、世界モデルの応用や研究の多くは、シミュレーション研究に限定される傾向にある。世界モデル、予測符号化、自由エネルギー原理に基づく自律型認知発達ロボットの開発には、実際のロボットでは十分に挑戦されていない課題がある。これらのアプローチは、認知の生成的な見方に基づいている。ロボットにおける認知発達や記号創発に関する研究において、確率的生成モデルに基づく計算論的認知モデルが多く開発されている。
本研究プロジェクトでは、世界モデルに基づくアプローチにより、実世界システムを実現するための理論的・実践的研究を行う。
Publication
-
Karl Friston, Rosalyn J. Moran, Yukie Nagai, Tadahiro Taniguchi, Hiroaki Gomi, Josh Tenenbaum, World model learning and inference, Neural Networks, 144(-), 573-590, 2021. https://doi.org/10.1016/j.neunet.2021.09.011
-
Masashi Okada, Tadahiro Taniguchi, Variational Inference MPC for Bayesian Model-based Reinforcement Learning, Conference on Robot Learning (CoRL) , 2019, paper
-
Masashi Okada, Norio Kosaka, Tadahiro Taniguchi, PlaNet of the Bayesians: Reconsidering and Improving Deep Planning Network by Incorporating Bayesian Inference, IEEE International Conference on Intelligent Robots and Systems (IROS), 2020, paper
-
Masashi Okada, Tadahiro Taniguchi, Dreaming: Model-based Reinforcement Learning by Latent Imagination without Reconstruction, IEEE International Conference on Robotics and Automation (ICRA) , 2021, paper
2. 汎用人工知能のための認知アーキテクチャを生み出す全脳確率的生成モデル
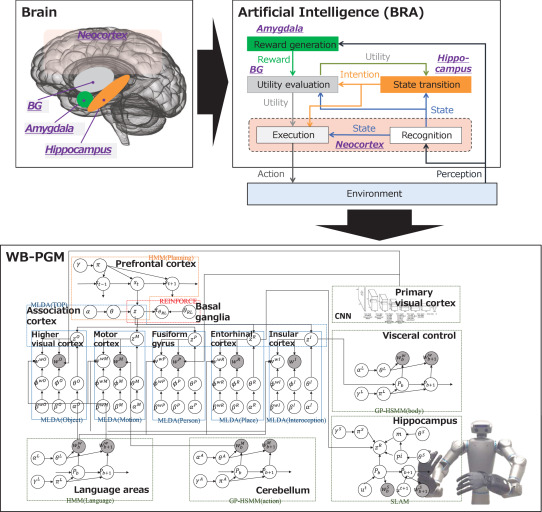
人間のような統合的な人工的な認知システム、すなわち汎用人工知能(AGI: Artificial General Intelligence)の構築は、人工知能(AI)分野の最大の目標の一つである。さらに、人工システムが認知機能の発達を実現する計算モデルは、脳科学や認知科学の優れた参考となる。谷口ら[1]は、要素的な認知モジュールを統合して認知アーキテクチャを開発し、全体として認知アーキテクチャの訓練を可能にするアプローチとして全脳確率的生成モデル(WB-PGM; Whole Brain Probabilistic Generative Models)について述べている。このアプローチは、以下の2つの考えに基づいている。(1)研究者が人間レベルの知能を構築するために人間の脳アーキテクチャを学習して構築するBrain-inspired AI、(2)確率的生成モデル(PGM)に基づく認知アーキテクチャをPGMを統合して発達ロボットの認知システムを開発することである。提案する開発フレームワークは全脳確率的生成モデル(WB-PGM)と呼ばれ、感覚-運動情報に基づくシステムを通じて連続的に学習できる点が既存の認知アーキテクチャと根本的に異なる点である。
PGMは変数間の明示的な情報関係を記述するという特徴を持つため、WB-PGMは計算科学から神経科学へ解釈可能な指針を提供する。このような情報を提供することで、神経科学の研究者は、AIやロボット工学の研究者に、現在のモデルに欠けている脳への言及をフィードバックすることができる。さらに、神経認知科学の研究者とAI・ロボット工学の研究者のコラボレーションを促進することができると期待される。
Publication
- Tadahiro Taniguchi, Hiroshi Yamakawa, Takayuki Nagai, Kenji Doya, Masamichi Sakagami, Masahiro Suzuki, Tomoaki Nakamura, Akira Taniguchi, A whole brain probabilistic generative model: Toward realizing cognitive architectures for developmental robots, Neural Networks, 150(-), 293-312, 2022. https://doi.org/10.1016/j.neunet.2022.02.026
- Tadahiro Taniguchi, Tomoaki Nakamura, Masahiro Suzuki, Ryo Kuniyasu, Kaede Hayashi, Akira Taniguchi, Takato Horii, Takayuki Nagai, Neuro-SERKET: Development of Integrative Cognitive System through the Composition of Deep Probabilistic Generative Models, New Generation Computing, 38(-), 23-48, 2020. https://doi.org/10.1007/s00354-019-00084-w
- Tomoaki Nakamura, Takayuki Nagai, Tadahiro Taniguchi, SERKET: An Architecture For Connecting Stochastic Models to Realize a Large-Scale Cognitive Model, Frontiers in Neurorobotics, 12(-), 25, 2018. DOI: 10.3389/fnbot.2018.00025
Books