


記号創発ロボティクスは、記号創発システムに対する構成論的アプローチであり、認知・発達ロボティクスと密接に関連する分野である。我々は、相互作用を通じて物理的・記号的環境に自律的に適応するロボットの開発を目指しています。
1. ロボティクスのための概念形成や表現学習
子どもは、親の日常的な行動を観察することで、さまざまな行動を身につけます。また、親の話を聞くことで、多くの単語やフレーズを学びます。このように、様々な行動や言葉を段階的に獲得していくことができるロボットは実現できないだろうか。子どもたちは日常生活の中で自然に言葉を学んでいますが、現在のロボット研究において、言葉の学習はまだ未解決の課題となっている。
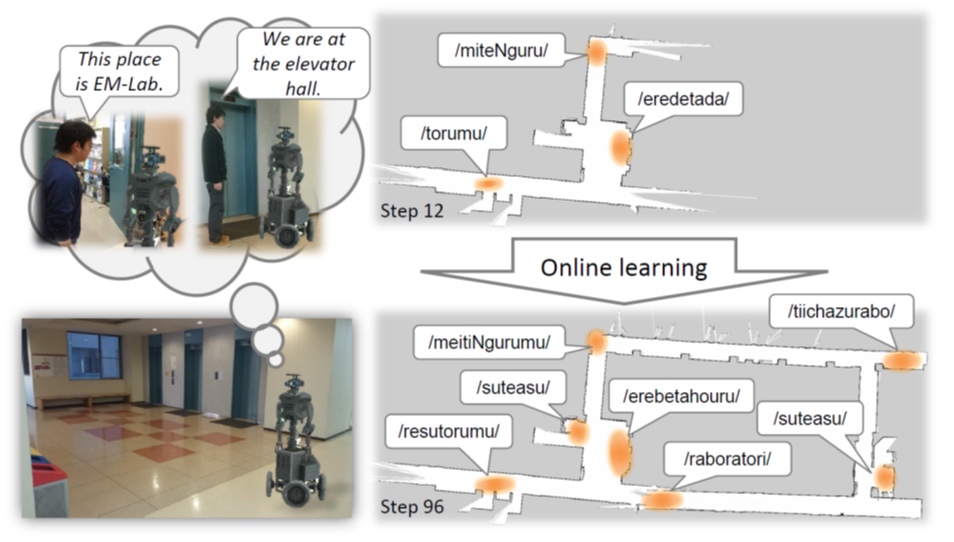
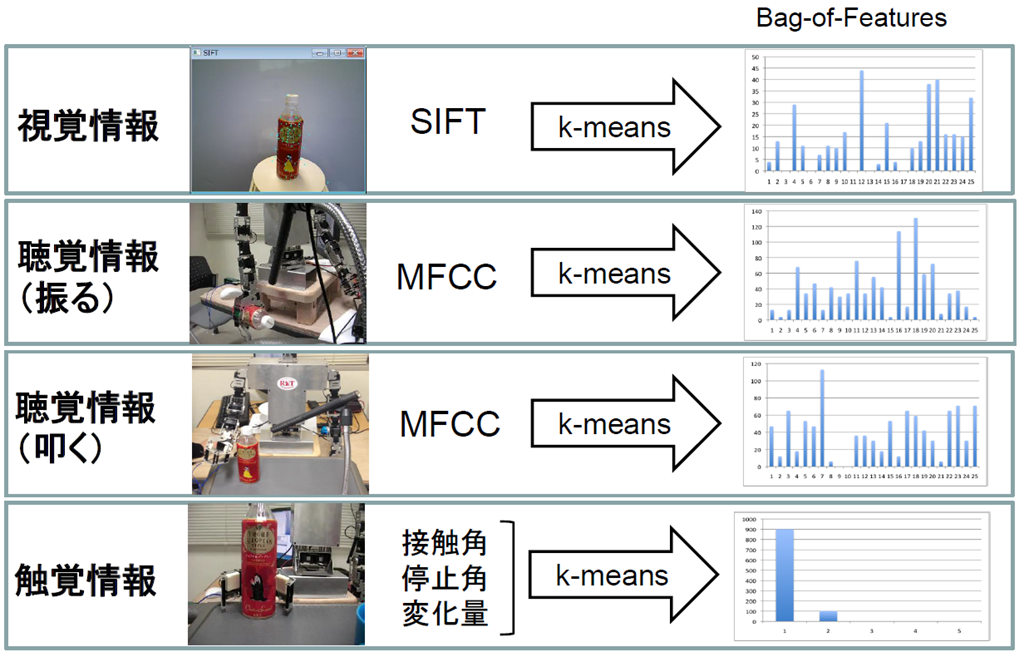
さまざまな概念や表現(表象)の学習に関しても多くのチャレンジがある。例えば、ロボットは通常、感覚情報から自分の位置を明確に認識することができない。しかし、人間は物理的な位置だけでなく、意味的な位置も認識しているようです。そこで、本研究では、このような場所を表す言葉の獲得過程と、ローカライゼーションやマッピングの過程を組み合わせることを試みている。場所概念形成や物体概念形成を始めとしたマルチモーダルな分類・概念形成は、その概念やカテゴリーを自力で獲得できるロボットを作ろうとする一連の研究である。
これらの文脈を受けて、当研究室では、概念形成、(内部)表現学習、語彙獲得に関連する一連の研究を行っている。
Publication
- Akira Taniguchi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Tetsunari Inamura, Improved and scalable online learning of spatial concepts and language models with mapping, Autonomous Robots, 44(6), 927-946, 2020. DOI: 10.1007/s10514-020-09905-0
- Akira Taniguchi, Tadahiro Taniguchi, and Tetsunari Inamura, Unsupervised Spatial Lexical Acquisition by Updating a Language Model with Place Clues, Robotics and Autonomous Systems, 99, 166-180, 2018. DOI: 10.1016/j.robot.2017.10.013
- Tadahiro Taniguchi, Shogo Nagasaka, Ryo Nakashima, Nonparametric Bayesian Double Articulation Analyzer for Direct Language Acquisition from Continuous Speech Signals, IEEE Transactions on Cognitive and Developmental Systems, 8(3), 171-185, 2016. DOI: 10.1109/TCDS.2016.2550591
2. サービスロボット:記号創発ロボティクスに基づくアプローチ

人とコミュニケーションをとりながら、生活環境の中で日常的な作業を行うロボットの開発は、人工知能(AI)やロボティクスにおける課題である。工場や商業環境での完全自動化だけでなく、人が遠隔操作するロボットは多くの作業を半自律的に行う必要があるため、効率的な在宅ワークライフを実現するためにも必要だ。
従来の画像認識や機械翻訳などのAI研究とは異なり、特定の作業に対して、ロボットはその単一の身体と統合的な認知システムで幅広い作業を処理する必要がある。
従来、サービスロボットの開発には、手作業で作成したコードによるルールベースのアプローチがよく用いられてきた。 しかし、それだけでは人間共存環境火で賢く振る舞うロボットを作ることはできない。不確実性に満ちた世界で、さまざまなタスクやインタラクションに対応するためには、機械学習に基づくアプローチが重要である。
私たちの研究室では、記号創発ロボティクスという考えのもと、サービスロボットに関する様々な研究を行っています。
また、RoboCup@HomeやWorld Robot Summit(WRS)など、多くのロボット競技会に参加し、複数の賞を獲得しています。
Publication
- L. El Hafi, S. Isobe, Y. Tabuchi, Y. Katsumata, H. Nakamura, T. Fukui, T. Matsuo, G.A. Garcia Ricardez, M. Yamamoto, A. Taniguchi, Y. Hagiwara, and T. Taniguchi, System for augmented human-robot interaction through mixed reality and robot training by non-experts in customer service environments, Advanced Robotics, 34(3-4), 157-172, 2020. DOI: 10.1080/01691864.2019.1694068
- Akira Taniguchi, Shota Isobe, Lotfi El Hafi, Yoshinobu Hagiwara, Tadahiro Taniguchi, Autonomous planning based on spatial concepts to tidy up home environments with service robots, Advanced Robotics, 35(8), 471–489, 2021. DOI: 10.1080/01691864.2021.1890212
- Tadahiro Taniguchi, Lotfi El Hafi, Yoshinobu Hagiwara, Akira Taniguchi, Nobutaka Shimada, Takanobu Nishiura, Semiotically Adaptive Cognition: Toward the Realization of Remotely-Operated Service Robots for the New Normal Symbiotic Society, Advanced Robotics, 35(11), 664-674, 2021. DOI: 10.1080/01691864.2021.1928552
3. 言語とロボティクス
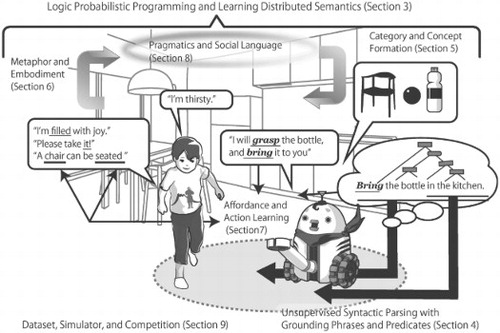
実世界環境における言語の理解と習得は、将来のロボットサービスにとって不可欠な課題である。自然言語処理と認知ロボティクスは、数十年にわたり機械学習を用いてこの問題に注力してきた。しかし、過去10年間に機械学習(深層学習や確率的生成モデルなど)が大きく進歩したにもかかわらず、多くの問題は未解決のままだ。私たちの研究は、ロボット学と言語学の研究の交差点に焦点を当て、人間が受け取る体現されたマルチモーダルな感覚運動情報に重点を置き、言語とロボティクスの相乗効果の可能性を探っている。
また、分散表現を用いた構文解析など、言語に関連する幅広い研究も行っている。
Publication
-
T. Taniguchi, D. Mochihashi, T. Nagai, S. Uchida, N. Inoue, I. Kobayashi, T. Nakamura, Y. Hagiwara, N. Iwahashi & T. Inamura, Survey on frontiers of language and robotics, Advanced Robotics, 33(15-16), 700-730, 2019. DOI: 10.1080/01691864.2019.1632223
- Tada, Y., Hagiwara, Y., Tanaka, H., & Taniguchi, T. (2020). Robust understanding of robot-directed speech commands using sequence to sequence with noise injection. Frontiers in Robotics and AI, 6, 144.doi.org/10.3389/frobt.2019.00144









{kind=link}